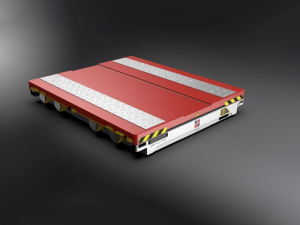
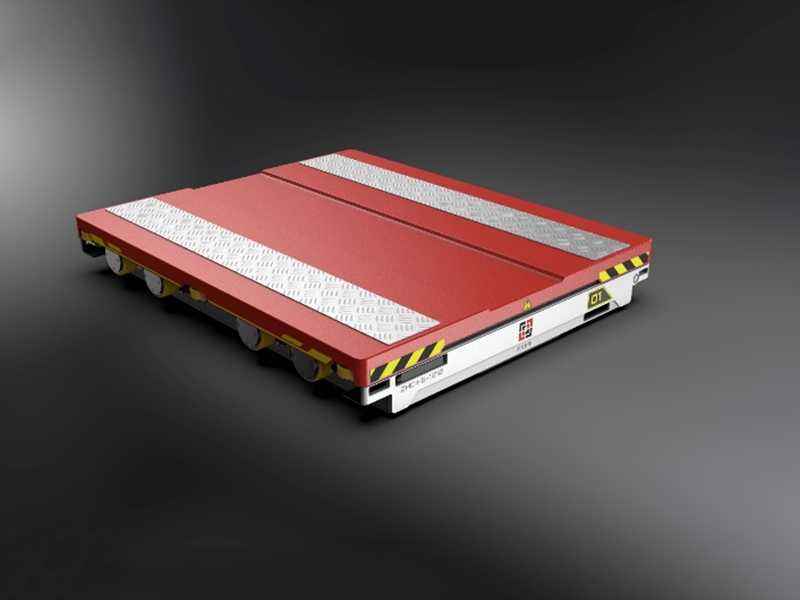
Sistemas de transporte 4D para aplicações de alta velocidade
Negócios padrão
Montagem e armazenamento de recebimentos fora do armazém
Camada de mudança de realocação e cobrança de inventário
Parâmetros técnicos
| projeto | Dados básicos | Observação | |
| modelo | SX-ZHC-H-1210-2T | ||
| Bandeja aplicável | Largura: 1200 mm Profundidade: 1000 mm | ||
| Carga máxima | Máx. 1500 kg | ||
| altura/peso | Altura do corpo: 150 mm, Peso do ônibus espacial: 350 kg | ||
| Caminhando na direção principal X | velocidade | Máxima sem carga: 3,0 m/s, carga máxima total: 2,0 m/s | |
| aceleração da caminhada | ≤ 1,0 m/S2 | ||
| motor | Servomotor sem escovas 48 VCC 1 5 00 W | Servo importado | |
| Driver do servidor | Driver servo sem escovas | Servo importado | |
| Ande na direção Y | velocidade | Máxima sem carga: 2,0 m/s, máxima com carga total: 1,0 m/s | |
| aceleração da caminhada | ≤ 0,6 m/S2 | ||
| motor | Servomotor sem escovas 48 VCC 15 00 W | Servo importado | |
| Driver do servidor | Driver servo sem escovas | Servo importado | |
| elevação de carga | Altura de elevação | 30 milímetros _ | |
| motor | Motor sem escovas 48 VCC 75 0 W | Servo importado | |
| elevação principal | Altura de elevação | 35 milímetros | |
| motor | Motor sem escovas 48 VCC 75 0 W | Servo importado | |
| Canal principal/método de posicionamento | Posicionamento de caminhada: posicionamento por código de barras / posicionamento a laser | Alemanha P+F/SICK | |
| Canal secundário/método de posicionamento | Posicionamento de caminhada: fotoelétrico + codificador | Alemanha P+F/SICK | |
| Posicionamento da bandeja: laser + fotoelétrico | Alemanha P+F/SICK | ||
| Sistema de controle | Controlador Programável PLC S7-1200 | Alemanha SIEMENS | |
| controle remoto | Frequência de trabalho 433 MHz, distância de comunicação de pelo menos 100 metros | Importação personalizada | |
| Fonte de energia | bateria de lítio | Alta qualidade nacional | |
| Parâmetros da bateria | 48V, 30AH, tempo de uso ≥ 6h, tempo de carregamento 3h, tempos de recarga: 1000 vezes | livre de manutenção | |
| método de controle de velocidade | Servo controle, torque constante de baixa velocidade | ||
| Método de controle de barra transversal | Agendamento WCS, controle de computador por toque, controle remoto | ||
| nível de ruído operacional | ≤60 dB | ||
| Requisitos de pintura | Combinação de rack (preto), tampa superior vermelha, alumínio frontal e traseiro branco | ||
| temperatura ambiente | Temperatura: 0℃~50℃Umidade: 5% ~ 95% (sem condensação) | ||
Por favor, insira o código de verificação